Since this seems to have sparked quite a bit of confusion, I want to make this post complete and thorough. There are two ways to program an MSP430: the first is using four-wire JTAG, the second is using two-wire JTAG. The LaunchPad can only use the two-wire JTAG method, which is also known as Spy-Bi-Wire (SBW). For the rest of this post, I will be referring to the two-wire JTAG as SBW and four-wire JTAG as just JTAG.
I want to make sure this is clear before I continue; JTAG and SBW are two separate methods for programming an MSP430. The LaunchPad can program MSP430s using SBW, not JTAG. That being said, not all MSP430s can be programmed using SBW, some of the older MSP430s can only be programmed using JTAG. TI has a document, SLAU157, which shows which chips support either just JTAG or both JTAG and SBW.
Now that we know JTAG and SBW are different methods of programming newer MSP430s, how do we use the LaunchPad to program all these cool devices? Spy-Bi-Wire needs two wires to program an MSP430: RST and TEST. The image below shows where you can find these two pins on the Launchpad.
 |
| The programming pins on the LaunchPad |
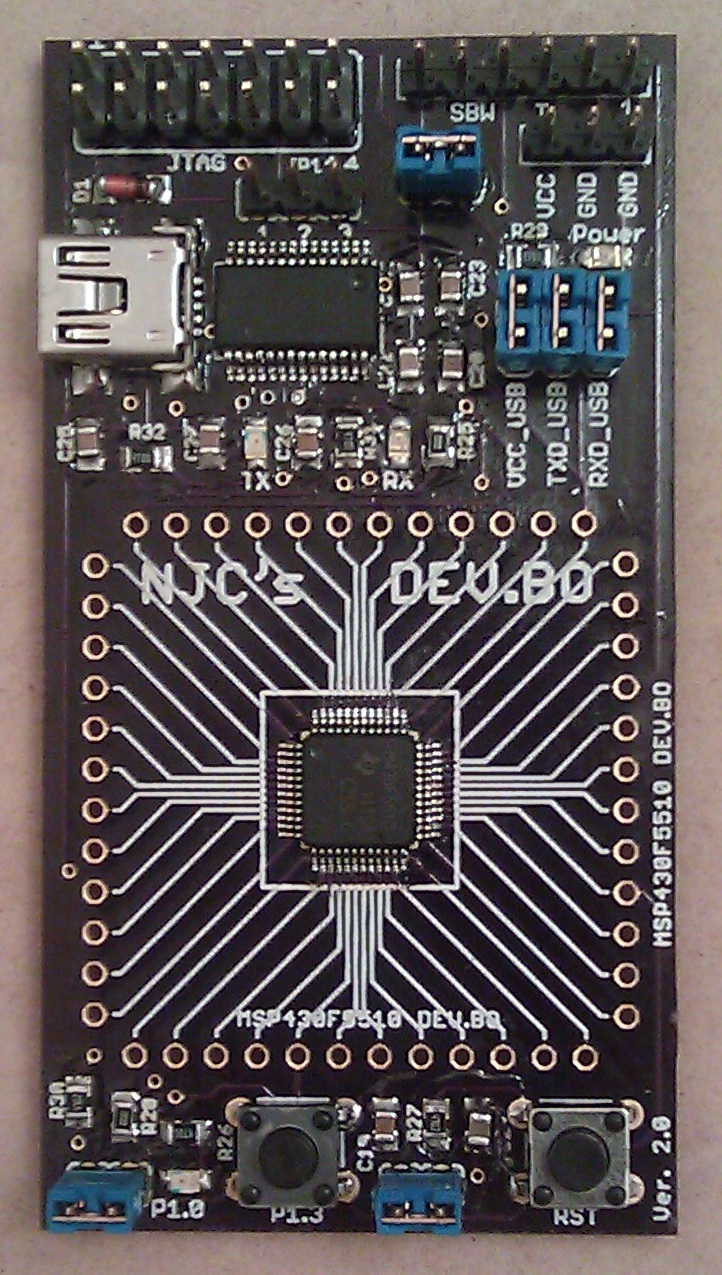
 |
| DEV.BO programming header |
 |
| The programming connection on the LaunchPad's side |
Hopefully that should clear up any confusion on how to program the DEV.BO. Using this method, you can also program any other MSP430 that supports SBW; just connect up the necessary pins and you can program away.
I have two last things I want to mention. The RXD and TXD pins are not needed for programming but I included them on the DEV.BO in case they are ever needed for a project. The second thing is that you need to make sure the correct chip is selected in CCS or whatever IDE you use when programming the MSP430, otherwise it probably won't work.
I hope this clears up any confusion on how to program external MSP430s, including the DEV.BO, using the LaunchPad. Please leave a comment if you have any questions about this post. Don't forget to check out the DEV.BO, which is available in my online store.
Comment away!